Eén van de meest succesvolle en meest gebruikte onderdelen aan boord van een Amerikaans ruimteveer was de Canadarm robotarm. Deze robotarm werd ontwikkeld door een Canadees bedrijf en werd tijdens het Space Shuttle programma gebruikt om satellieten en andere ladingen met vast te grijpen, te verplaatsen of uit te zetten in een baan om de aarde. Na het tragische ongeval met het ruimteveer Columbia werd de Canadarm robotarm tijdens elke ruimtevlucht ook specifiek gebruikt om het ruimteveer te inspecteren op eventuele schade.
De Amerikaanse ruimtevaartorganisatie NASA vroeg in 1969 aan Canada om het land interesse had om mee te werken aan het Space Shuttle ruimteprogramma. Ook al was het op dat moment nog niet duidelijk welke rol Canada zou spelen in dit ambitieuze ruimteprogramma toch toonde NASA heel wat interesse in een robot dat het Canadese bedrijf DSMA ATCON had ontwikkeld waarmee men nucleaire reactors kon voorzien van brandstof. Uiteindelijk ondertekenden NASA en de Canadian National Research Council (NRC) in 1975 een overeenkomst waarin stond dat Canada een robotarm zou ontwikkelen voor de Amerikaanse Space Shuttle. De Canadian National Research Council (NRC) bestede dit project uit aan het Canadese bedrijf Spar Aerospace waarna in februari 1981 het toenmalige hoofd van de Canadian National Research Council (NRC) deze robotarm officieel omdoopte tot 'Canadarm', daarvoor heette dit systeem officieel 'Shuttle Remote Manipulator System'. Enkele maanden later werd de eerste afgewerkte en operationele Canadarm afgeleverd aan NASA. Tijdens de bemande ruimtemissie STS-2, de tweede ruimtevlucht van een Amerikaans ruimteveer, werd de Canadarm in november 1981 uiteindelijk voor het eerst meegneomen en getest in de ruimte. Het eerste echte operationele gebruik van de Canadarm vond plaats in maart 1982 tijdens de STS-3 missie toen Amerikaanse astronauten er de Plasma Diagnostics Package met uit het vrachtruim tilden en dit uitzette in een baan om de aarde.
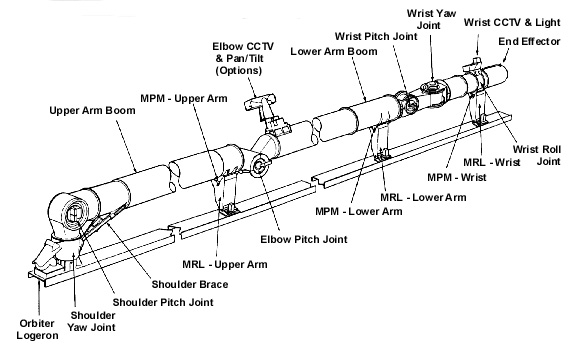
Het ontwerp van deze bijzondere robotarm werd gebaseerd op het werking van een menselijke arm. Zo had de Canadarm ook een 'bovenarm', een 'onderarm', en een 'pols'. Deze drie belangrijke onderdelen hingen aan elkaar en konden functioneren dankzij koppelstukken die functioneerden als een gewricht bij de menselijke arm. De bediening van deze robotarm kon worden uitgevoerd met een speciaal bedieningspaneel aan boord van het 'flight deck' van elk ruimteveer. Aan elke Canadarm robotarm bevonden zich ook twee camera's zodat elke beweging goed in beeld kon worden gebracht. Alles samen was de Canadarm 15,2 meter lang, had deze een diameter van 38 centimeter en woog de robotarm zelf 410 kilogram. De oorspronkelijke Canadarm kon in de ruimte vrachten tot 29 000 kilogram optillen uit het vrachtruim van het ruimteveer. Hierdoor kon de Canadarm in de ruimte gebruikt worden om satellieten met 'vast te grijpen' waarna deze werden voorzien van nieuwe onderdelen of terug in het vrachtruim werden gebracht van het ruimteveer. Daarnaast kon de Canadarm robotarm ook worden gebruikt tijdens ruimtewandelingen aangezien astronauten zich aan het uiteinde van de robotarm konden vastmaken. Hiervoor werd in het Johnson Space Center in Texas speciaal een Canadrm robotarm geïnstalleerd zodat astronauten hiermee konden trainen en oefenen. Eén van de grootste successen van het gebruik van de Canadarm robotarm zijn de vijf onderhoudsmissies van de Hubble Space Telescope. Tijdens deze Space Shuttle missies werd de Hubble Space Telescope in de ruimte 'vastgegrepen' met de Canadarm waarna astronauten tijdens ruimtewandelingen de ruimtetelescoop nieuwe experimenten, batterijen of andere onderdelen gaven. In de jaren '90 onderging de Canadarm een modernisering waardoor deze vanaf dan vrachten tot 266 000 kilogram in de ruimte kon optillen. Deze modernisering kwam er doordat de Amerikaanse ruimteveren een belangrijke rol zouden spelen in de bouw van het internationale ruimtestation ISS. Zo kon een ruimteveer modules en andere grote onderdelen mee de ruimte innemen waarna deze in een baan om de aarde aan elkaar konden bevestigd worden dankzij onder andere de Canadarm.

Na het tragische ongeval met het ruimteveer Columbia in 2003, waarbij het hitteschild van het ruimteveer ernstige schade opliep tijdens de lancering, kreeg de Canadarm robotarm een totaal nieuwe functie. Zo werd door NASA beslist om vanaf dan alle ruimteveren te onderwerpen aan een externe inspectie tijdens de eerste omloopbanen om de aarde. Aangezien dit te complex was om dit door astronauten te laten uitvoeren tijdens ruimtewandelingen en dit te veel tijd in beslag zou nemen werd gekozen voor de Canadarm om deze inspectie uit te voeren. Hiervoor werd speciaal het Orbiter Boom Sensor System (OBSS) ontwikkeld dat werd vastgenomen door de Canadarm en waarmee de volledige buitenkant en onderkant van een ruimteveer kon met geïnspecteerd worden op eventuele schade. Het Orbiter Boom Sensor System (OBSS) was een 15,2 lang verlengstuk van de Canadarm met aan het uiteinde tal van camera's en lasers waarmee vooral de vleugels en het hitteschild van het ruimteveer werden met geïnspecteerd. Deze inspectie werd uiteindelijk meteen na elke lancering uitgevoerd en vlak voor de terugkeer in de atmosfeer van de aarde. Dankzij dit systeem kon NASA garanderen dat het ruimteveer veilig was en kon het Space Shuttle programma nog enkele jaren operationeel blijven.
Toen in juli 2011 een eind kwam aan het succesvolle Amerikaanse Space Shuttle programma kwam er ook een einde aan de succesvolle Canadarm robotarm. De drie Canadarm robotarmen die op dat moment nog operationeel waren, werden elk tentoongesteld in het Kennedy Space Center Visitor Complex in Florida, in het Steven F. Udvar-Hazy Center in Virginia en in het Canada Aviation and Space Museum in Ottawa. Toch zou het succes van de in Canada ontwikkelde robotarm niet helemaal stoppen aangezien ook het internationale ruimtestation ISS een eigen robotarm heeft, de Canadarm2, waarvan het ontwerp en de werking gebaseerd is op dat van zijn voorganger. De Canadarm2 robotarm werd in 2001 aan het ruimtestation bevestigd en wordt sindsdien gebruikt voor tal van taken op vlak van onderhoud, inspectie en wetenschappelijk onderzoek.